热点资讯
其他资讯
- 2023北京W6Mo5Cr4V2Co5元棒、W6Mo5Cr4V2Co5发蓝料##鼎盛钢材
- 江苏35crmnsia钢板现货
- 钦州-N08028对应国标钢号180.0199.2776
- 烟筒升降梯-脱硫塔电梯-吸收塔升降机→西华生产厂家制造厂商
- 烟囱电梯质量控制——新县生产制造厂家
- 浙江sks3模具钢圆钢、时效价格实惠
- 北京市海淀区八里庄街道角钢 北京市海淀区八里庄街道钢材市场 北京市海淀区八里庄街道钢铁市场
- 河北张家口WRF-140万大卡燃气纯净风热风炉-燃气热风炉标准
- 上海SKH51高速钢预硬料注重质量
- 临安回收民国像章 临安现场支付纪念章回收
- 玉树H420LAD+Z镀锌薄板、H420LAD+Z材料的用途富宝
前行动力机电行星式PLFS080-L1-7-S2-P2斜齿轮行星齿轮箱
文章来源:ymcdkj
发布时间:2024-04-29 07:30:59
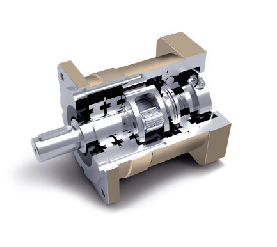
前行动力机电:行星式PLFS080-L1-7-S2-P2斜齿轮行星齿轮箱
目前,工业内窥镜的技术发展朝向自动化、立体显示和原位内窥维修方向发展。工业控制自动化技术是一种运用控制理论、仪器仪表、计算机和其它信息技术,对工业生产过程实现检测、控制、优化、调度、管理和决策,达到增加产量、提高质量、降低消耗、确保安全等目的的综合性技术,主要包括工业自动化软件、硬件和系统三大部分。随着高清的火爆、数码摄像机普及,CCD的像素始增多,CMOS和CCD图像传感器作为交互式机器视觉、电子内窥镜的眼睛始大举占领图像传感器领域。
行星齿轮减速机工作原理:
1)齿圈固定,太阳轮主动,行星架被动。 此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
2)齿圈固定,行星架主动,太阳轮被动。此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
3)太阳轮固定,齿圈主动,行星架被动。此种组合为降速传动,传动比一般为1.25~1.67,转向相同。
4)太阳轮固定,行星架主动,齿圈被动。此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
5)行星架固定,太阳轮主动,齿圈被动。传动比一般为1.5~4,转向相反。
6)行星架固定,齿圈主动,太阳轮被动。此种 转向相反。
7)把三元件中任意两元件结合为一体的情况:当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。
伺服减速机的具体作用,如下:
1、能保证精密传动的前提下,主要被用来降低转速增大扭矩和降低负载/电机的转动惯量比。
2、伺服减速机一般可用于低转速大扭矩的传动设备,把电动机、内燃机或其它高速运转的动力通过减速机的输入轴上的齿数少的齿轮啮合输出轴上的大齿轮来达到减速的目的。
3、伺服减速机能在降速的同时,提高输出扭矩,扭矩输出比例按电机输出乘减速比。但,在此过程中,要注意不能超出伺服减速机额定扭矩,否则有可能会造成无法正常输出扭矩。
4、除了降速及提高输出扭矩外,伺服减速机不可以有效降低负载的惯量。其负载惯量的减少为减速比的平方。在一般的情况,电机都会有一个惯量数值,因此,在进行负载惯量时,大家可以看一下。
这对于提高伺服电机的低速控制的稳定性 减少低速脉动有很大帮助。但对于提高位置控制的精度没有直接效果。当然也有采用类似于螺距补偿一样的软件补偿,可以提高单圈的物理分辨率,从而实际提高控制的精度。这在分度转台机器人控制的使用中,可得到有效作用。也正是由于内插接技术的应用,使得旋转编码器也将会在严酷环境中的高精度伺服控制中得到更广泛的应用。现在已有224/每转分辨率的旋转编码器在伺服电机上的使用情况。编码器目前的串行通讯省线制的方式,其通讯频率还只能限于10M以下。随着伺服控制的高分辨率、高精度、高响应的要求日益增强,编码器通讯频率的提高也将会是一个主要方向。
,对于伺服驱动控制器来说,其发展方向借助于IT产业技术的发展,将会有更令人耳目一新的感觉。看一下如今的手机照相机等,其丰富多彩的各种功能不难想象有很多功能都是可以借鉴和移植到伺服驱动控制器上来的。
从交流伺服电机的矢量控制技术本身来说已日趋完善普及。从实时操作系统的角度来看,它只是需要实时响应的一个功能模块。由于控制器的多功能、智能化要求,大量的信号,适应控制需要的各种数学模型的建立与运行,网络通讯等各个功能模块将会在实时操作系统的统一调度和管理下得到正确可靠的运行。
+ -100-S2-P2