热点资讯
其他资讯
智造未来机电轮轴式AXF060-L2-35-K7-11机器人步进减速器
文章来源:ymcdkj
发布时间:2024-05-04 15:00:19
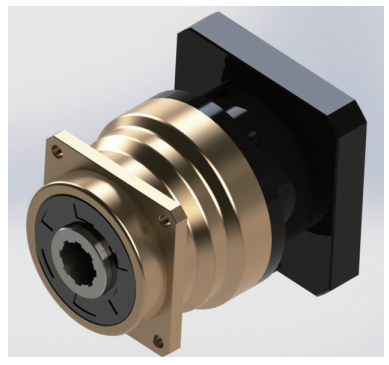
7-11机器人步进减速器
覆层厚度的测量方法主要有:楔切法,光截法,电解法,厚度差测量法,称重法,X射线荧光法,射线反向散射法,电容法、磁性测量法及涡流测量法等。这些方法中前五种是有损检测,测量手段繁琐,速度慢,多适用于抽样检验。X射线和射线法是无接触无损测量,但装置复杂昂贵,测量范围较小。因有 ,使用者必须遵守射线防护规范。X射线法可测极薄镀层、双镀层、合金镀层。射线法适合镀层和底材原子序号大于3的镀层测量。电容法仅在薄导电体的绝缘覆层测厚时采用。
减速特性
1、高扭力、耐冲击:行星齿轮之机构形同于传统平行齿轮的传动方式。传统齿轮仅依靠两个齿轮间极少数点接触面挤压驱动,所有负荷集中于相接触之少数齿轮面,容易产生齿轮间摩擦与断裂。而行星齿轮减速机具有六个更大面积与齿轮接触面360度均匀负荷,多个齿轮面共同均匀承受瞬间冲击负荷,使其更能承受较高扭矩力之冲击,本体及各轴承零件也不会因高负荷而损坏破裂。
2、体积小、重力轻:传统齿轮减速机的设计皆有多组大小齿轮偏向交错传动减速,由于减速比须由两个齿轮数之倍数值产生,大小齿轮间更要有一定之间距咬合,因此齿箱容纳空间极大,尤其高速比的组合时更需要由两台以上减速齿箱连接组合,结构强度相对减弱,更使齿箱长度加长,造成体积与重量极为庞大。行星减速机的结构可依需求段数重复连接,单独完成多段组合,体积小,重量轻、外观轻巧,相形使设计更有价值感。
1, 如何正确选择伺服电机和步进电机?
主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界面和通讯方面的要求),主要控制方式是位置、转矩还是速度方式。供电电源是直流还是交流电源,或电池供电,电压范围。据此以确定电机和配用驱动器或控制器的型号。
2, 选择步进电机还是伺服电机系统?
其实,选择什么样的电机应根据具体应用情况而定,各有其特点。
3, 如何配用步进电机驱动器?
根据电机的电流,配用大于或等于此电流的驱动器。如果需要低振动或高精度时,可配用细分型驱动器。对于大转矩电机,尽可能用高电压型驱动器,以获得良好的高速性能。
4, 2 相和 5 相步进电机有何区别,如何选择?
2 相电机成本低,但在低速时的震动较大,高速时的力矩下降快。 5 相电机则振动较小,高速性能好,比 2 相电机的速度高 30~50% ,可在部分场合取代伺服电机。
螺旋丝杆升降机是一种 常见的起重部件,这种螺旋丝杆升降机与其他蜗轮升降机相比具有结构更加紧凑、方便、体积小、输入形式多样、可靠性高、寿命长等许多优点,但是有时螺旋丝杆升降机出现上升力弱的现象,原因有哪些呢?
原因一:由于丝杆升降机的溢流阀压力调节的不符合相关要求,当调整到设备压力要求值后就能避免问题的发生了。
原因二:由于油缸内泄而直接导致的,想要避免这种情况发生就需要检查或者进行更换丝杆升降机的油缸组件。
原因三:由于设备的换向阀卡紧或者是内泄,需要进行检查或者更换设备阀组件。
原因四:由于丝杆升降机的油面过低、进油滤油器堵塞和加油不足而导致的,想要避免这种情况的发生,不仅仅需要加足油而且还需要能清洗设备的滤油器。
原因五:设备的供油泵出现了问题,想要解决这种问题的话就需要检查或者是更换供油泵。
+
P 5-35-P2-P1 -200-P2-P1