旧县乡步进式BH120A-L2-25-B2-D1-S8一段式伺服变速器
文章来源:ymcdkj
发布时间:2024-05-06 03:05:29
旧县乡:步进式BH120A-L2-25-B2-D1-S8一段式伺服变速器
螺丝是每个的工具,大多是一字和十字的居多,也有很多人了螺丝的套装,但是碰到拆解空间比较狭小,长螺丝放不下,小螺丝又不好用力的情况,这时你应该拥有这样一套工具,可以帮你解决这一难题。ORICO针对这种情况,发了一套24套装的精密工具。下面我来看看这款产品。包装采用黄色硬纸板盒加简易图,口处贴了黑色封条。整个包装非常的扎实,可以保证产品在运输途中完好无损。内包装为翻盖设计,采用透明上盖,里面的工具套装可以一目了然。
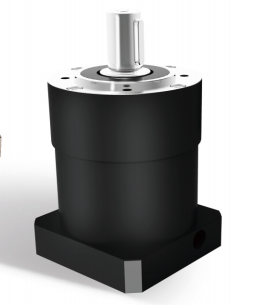
3、行星齿轮减速机体积小、质量小,结构紧凑,承载能力大 由于行星齿轮传动具有功率分流和各中心轮构成共轴线式的传动以及合理地应用内啮合齿轮副,因此可使其结构非常紧凑。再由于在中心轮的周围均匀地分布着数个行星轮来共同分担载荷,从而使得每个齿轮所承受的负荷较小,并允许这些齿轮采用较小的模数。同轴减速机此外,在结构上充分利用了内啮合承载能力大和内齿圈本身的可容体积,从而有利于缩小其外廓尺寸,使其体积小,质量小,结构非常紧凑,且承载能力大。一般,行星齿轮传动的外廓尺寸和质量约为普通齿轮传动的1/2~1/5 (即在承受相同的载荷条件下)。
4、行星齿轮减速机传动效率高 由于行星齿轮传动结构的对称性,即它具有数个匀称分布的行星轮,使得作用于中心轮和转臂轴承中的反作用力能互相平衡,从而有利于达到提高传动效率的作用。在传动类型选择恰当、结构布置合理的情况下,其效率值可达0.97~0.99。
行星伺服减速机速比计算方法:
一、定义计算方法:
减速比=输入转速÷输出转速。
二、通用计算方法:
减速比=使用扭矩÷电机功率电机功率输入转数÷使用系数。
三、齿轮系计算方法:
减速比=从动齿轮齿数÷主动齿轮齿数÷主动轮齿数,然后把得到的结果进行相乘。
以上的介绍的内容,就是行星伺服减速机 为常用的三种计算方法,通过这三种计算方式,就可以准确地计算出行星伺服减速机的速比。但是,因为力的作用是相互的,所以在选择大的功率配大的减速比时,要注意行星伺服减速机安全系数的选择。否则,若是安全系数小的话,万一出现急停很容易会造成打齿的情况出现。
2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于装置。
应用领域如数控机床、印刷机械等等。
3、速度模式:通过模拟量的输入或脉冲
的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行,但必须把电机的位置信号或直接负载的位置信号给上位反馈以运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的 终负载端的检测装置来了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的精度。
交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)
+< -005-S2
4 -005-S2